KOMCAN

Общие сведения
Устройство предназначено для работы в составе системы мониторинга транспорта Комбат, и позволяет считывать информацию с шины CAN автомобиля и передавать её в прибор мониторинга транспорта "Вектор" через интерфейс RS-485.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
| Напряжение питания | 10–40V |
| Температура хранения и эксплуатации | -40..+85⁰С |
| Средняя потребляемая мощность | не более 200 мВт |
| Скорость шины RS-485 | 19,2 кбит/сек |
| Скорость CAN-шины | до 500 кбит/сек |
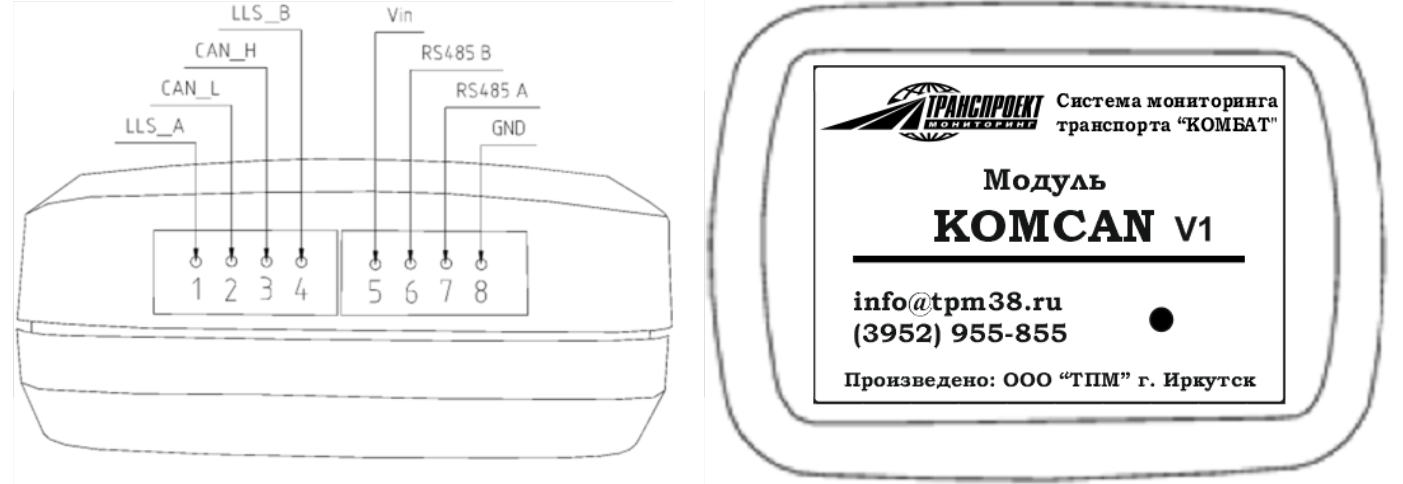
Устройство имеет два разъёма по 4 вывода для подключения питания, линии RS-485, линии CAN, топливного датчика LLS
Размещать устройство необходимо таким образом, чтобы длина провода CAN между устройством и шиной CAN автомобиля была не более 0,5м.
Подключение линий LLS_A и LLS_B производить при наличии топливного датчика на автомобиле. Линии A и B подключить к линии RS-485 прибора мониторинга Вектор/ТПМ, питание брать в той же точке, что и для питания прибора мониторинга.
| Линия | Назначение | Цвет |
| LLS_A | Линия RS-485 A к топливному датчику | Зелёный |
| CAN_L | Линия CAN к автомобилю | Синий |
| CAN_H | Линия CAN к автомобилю | Коричневый |
| LLS_B | Линия RS-485 B к топливному датчику | Серый |
| Vin | Плюс питания | Красный |
| B | Линия RS-485 к прибору мониторинга | Белый |
| A | Линия RS-485 к прибору мониторинга | Желтый |
| GND | Минус питания | Чёрный |
В устройство встроен светодиод, который определённым количеством вспышек показывает состояние:
- Есть опрос по шине RS-485 и есть данные на CAN-шине
- Есть опрос по шине RS-485, нет данных на CAN-шине
- Нет опроса по шине RS-485, есть данные на CAN-шине
- Нет опроса по шине RS-485, нет данных на CAN-шине
Модуль КОМCAN может быть подключен параллельно другому оборудованию с интерфейсом RS485(провода A и B). В некоторых случаях датчик уровня топлива может работать некорректно при наличии на шине RS-485 чужого протокола. Для исключения этого топливный датчик рекомендуется подключать к преобразователю через провода LLS_A и LLS_B. Преобразователь в этом случае будет транслировать на провода LLS_A и LLS_B только запросы к топливному датчику.
После подключения к шине CAN устройство автоматически определяет скорость работы шины в течение 2 секунд и светодиодом индицирует наличие данных. Таким образом можно проверить правильность подключения.
ПРИНЦИП РАБОТЫ
CAN-шина – это система цифровой связи между электронными блоками в автомобиле, позволяющая собирать данные от всех устройств, обмениваться информацией между ними, управлять ими. Информация о состоянии устройств и командные (управляющие) сигналы для них передаются в цифровой форме по специальному протоколу двумя проводами, т.н. «витая пара». Кроме того к каждому устройству подается и питание от бортовой электросети, но в отличии от обычной проводки – все потребители соединены параллельно, нет необходимости вести от каждого выключателя до каждой лампочки свой провод. Это значительно упрощает монтаж, снижает число проводов в жгутах и повышает надёжность всей электросистемы.
Основным протоколом передачи данных по шине CAN в грузовых автомобилях является J1939. KOMCAN автоматически, в непрерывном режиме, принимает данные бортовой шины CAN по протоколу J1939.
В списке отмечены наиболее часто встречаемые параметры с шины CAN J1939:
- Температура, обороты и мощность двигателя
- Давление масла
- Температуры жидкостей и агрегатов
- Скорость автомобиля
- Расход и уровень топлива
- Общий пробег
- Наработка агрегатов(моточасы)
- Информация от тахографа
- Состояние тормозной системы
- Диагностические сообщения
- Разница скорости вращения колёс
- Качество работы фильтров
Конкретный список параметров зависит от марки автомобиля.
Одновременно для просмотра можно выбрать до 8 параметров. Все остальные параметры, которые присутствуют на шине CAN, будут при этом передаваться раз в час.